As with any change that increases the complexity of the system, the use of multiple processors generates design considerations that must be addressed for satisfactory operation and performance. The additional complexity gives more scope for hardware/software tradeoffs and requires closer hardware/software design coordination than in uniprocessor systems. The different combinations of design responses and tradeoffs give rise to a wide variety of multiprocessor system architectures.
This section describes the main design considerations of multiprocessor systems and the responses of AIX and the RS/6000 to those considerations.
Perhaps the most fundamental decision in designing a multiprocessor system is whether the system will be symmetrical or asymmetrical.
The major design considerations are:
In an asymmetrical multiprocessor system, the processors are assigned different roles. One processor may handle I/O, while others execute user programs, and so forth. Some of the advantages and disadvantages of this approach are:
In a symmetrical multiprocessor system, all of the processors are essentially identical and perform identical functions:
This interchangeability means that all of the processors are potentially available to handle whatever needs to be done next. The cost of this flexibility is primarily borne by the hardware and software designers, although symmetry also makes the limits on the multiprocessability of the workload more noticeable, as we shall see.
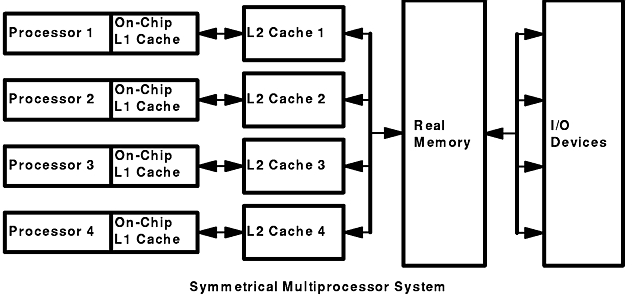
The RS/6000 family contains, and AIX Version 4 supports, only symmetrical multiprocessors, one form of which is shown in the figure Symmetrical Multiprocessor System. Different systems may have different cache configurations.
Although RS/6000 multiprocessor systems are technically symmetrical, a minimal amount of asymmetry is introduced by the software. A single processor is initially in control during the boot process. This first processor to be started is designated as the "master processor." To ensure that user-written software continues to run correctly during the transition from uniprocessor to multiprocessor environments, device drivers and kernel extensions that do not explicitly describe themselves as able to run safely on multiple processors are forced to run only on the master processor. This constraint is called "funnelling."
Any storage element that can be read or written by more than one thread may change while the program is running. This is generally true of multiprogramming environments as well as multiprocessing environments, but the advent of multiprocessors adds to the scope and importance of this consideration in two ways:
To avoid disaster, programs that share data must arrange to access that data serially, rather than in parallel. Before a program touches a shared data item, it must ensure that no other program (including another copy of itself running on another thread) will change the item.
The primary mechanism that is used to keep programs from interfering with one another is the lock. A lock is an abstraction that represents permission to access one or more data items. Lock and unlock requests are atomic; that is, they are implemented in such a way that neither interrupts nor multiprocessor access affect the outcome. All programs that access a shared data item must obtain the lock that corresponds to that data item before manipulating it. If the lock is already held by another program (or another thread running the same program), the requesting program must defer its access until the lock becomes available.
Besides the time spent waiting for the lock, serialization adds to the number of times a thread becomes nondispatchable. While the thread is nondispatchable, other threads are probably causing the nondispatchable thread's cache lines to be replaced, which will result in increased memory-latency costs when the thread finally gets the lock and is dispatched.
The AIX kernel contains many shared data items, so it must perform serialization internally. This means that serialization delays can occur even in an application program that does not share data with other programs, because the kernel services used by the program have to serialize on shared kernel data.
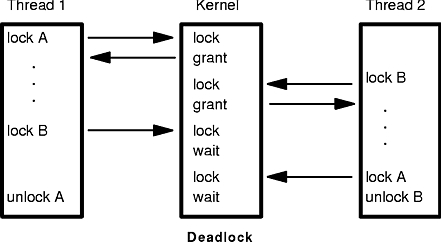
A programmer working in a multiprocessor environment must decide how many separate locks should be created for shared data. If there is a single lock to serialize the entire set of shared data items, lock contention is comparatively likely. If each distinct data item has its own lock, the probability of two threads contending for that lock is comparatively low. Each additional lock and unlock call costs processor time, however, and the existence of multiple locks makes a deadlock possible. At its simplest, deadlock is the situation shown in the figure "Deadlock," in which Thread 1 owns Lock A and is waiting for Lock B, while Thread 2 owns Lock B and is waiting for Lock A. Neither program will ever reach the unlock call that would break the deadlock. The usual preventive for deadlock is to establish a protocol by which all of the programs that use a given set of locks must always acquire them in exactly the same sequence.
Requesting locks, waiting for locks, and releasing locks add processing overhead in several ways:
In designing a multiprocessor, engineers give considerable attention to ensuring cache coherency. They succeed; but their success is not free. To understand why cache coherency has a performance cost, we need to understand the problem being attacked:
If each processor has a cache (see figure "Symmetrical Multiprocessor System") , which reflects the state of various parts of memory, it is possible that two or more caches may have copies of the same line. It is also possible that a given line may contain more than one lockable data item. If two threads make appropriately serialized changes to those data items, the result could be that both caches end up with different, incorrect versions of the line of memory; that is, the system's state is no longer coherent -- the system contains two different versions of what is supposed to be the content of a specific area of memory.
The solutions to the cache coherency problem usually include invalidating all but one of the duplicate lines. Although the invalidation is done by the hardware, without any software intervention, any processor whose cache line has been invalidated will have a cache miss, with its attendant delay, the next time that line is addressed.
For a detailed background discussion of RS/6000 addressing architecture and cache operation, see Appendix C. Cache and Addressing Considerations.
If a thread is interrupted and later redispatched to the same processor, there may still be lines in that processor's cache that belong to the thread. If the thread is dispatched to a different processor, it will probably experience a series of cache misses until its cache working set has been retrieved from RAM. On the other hand, if a dispatchable thread has to wait until the processor it was previously running on is available, the thread may experience an even longer delay.
Processor affinity is the dispatching of a thread to the processor that was previously executing it. The degree of emphasis on processor affinity should vary directly with the size of the thread's cache working set and inversely with the length of time since it was last dispatched.
In AIX Version 4, processor affinity can be achieved by binding a thread to a processor. A thread that is bound to a processor can run only on that processor, regardless of the status of the other processors in the system.
In a uniprocessor, contention for some internal resources, such as banks of memory and I/O or memory buses, is usually a minor component processing time. In a multiprocessor these effects can become more significant, particularly if cache-coherency algorithms add to the number of accesses to RAM.
{kind=link}
{kind=link}